XtraSmiley
Legendary
Amazing work, and great job! It is a LOT of work for such an average game though! Still, very cool. Maybe there will be a way to retro-fit Afterburner in there when you're done!
Amazing work, and great job! It is a LOT of work for such an average game though! Still, very cool. Maybe there will be a way to retro-fit Afterburner in there when you're done!
I have AfterBurner Climax Lindbergh, I may fit into GLoc as a swappable board.I posted a while back about stepper driven afterburner, as seen on this video:
That's just a test.In your demo it looks like they're going a little slower than the stock speed? have you had them cranked up as I know steppers can get quite noisy. I started doing something similar with my punch mania (swapping the stock motors for steppers).
I seen a couple of old gloc deluxes running Afterburner climax . One was using a ps3 and the other a lindbergh but obviously neither had motion something you could possibly do with your custom setup.
I was thinking what about changing pulley diameters on the motor/ballscrew. IIRC correctly the motor has a small one and the ballscrew the larger one but now you have the ability to control speed/steps you could change the pulley size to get you in the right ballpark at a reasonable speed and then dial in the difference afterwards. Not sure of the specifications of your motor but pretty sure if you crank the speed too high it starts to lose torque.


you should open a separate thread where you explain how to make it, it might save several G-Loc DeluxePubblicherò questo video come riferimento.
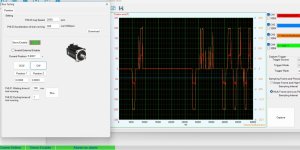
Ciò che vedete è un "decodificatore di posizione" basato su Arduino, che legge la posizione target e la velocità dei motori L e R dalla CPU principale, collegata al posto della scheda di movimento originale.
Se qualcuno ne avesse bisogno, pubblicherei il codice sorgente.